The Canadian Automated Meteor Observatory (CAMO)
To better measure the faint meteor population in the optical wavelength range on a regular basis, the Canadian Automated Meteor Observatory (CAMO) has been constructed. Begun in 2005, the system is now fully functional with final engineering tests remaining on only one of the sub-systems of CAMO.
CAMO consists of two automated observatories separated by a baseline of 50 km each of which contains two distinct fixed camera systems. The observtaory is a basic roll-off roof-type structure under fully autonomous control. The two sites are Elginfield, Ontario (shown below)

and a second site co-located with the Canadian Meteor Orbit Radar (CMOR) near Tavistock, Ontario

The sheds have sensors for detecting outside light levels, clouds, rain, and winds.
Inside each shed are two separate low light level video systems. The first is a wide field, high bitdepth sensitive camera system using the commercially available PCO Imaging PCO.1600 camera. This high sensivity, high resolution CCD produces a 1600x1200 image with progressive frame rate run at 20 frames per second and a bit depth of 14.

The camera is lens coupled to an ITT Nitecam model 380i generation 3 image intensifier. The digital output from the camera is streamed to disk using the cameralink framegrabber. A GPS stamp is digitally embedded within the streamed data and is accurate to a fraction of the interframe time. The entire system is mounted inside an environmentally controlled camera housing and pointed at a fixed azimuth and altitude at each site with maximum height overlap near 100 km.

The high resolution, wide field system has a 21 degree field of view and a +10 stellar magnitude limit. The camera is able to detect meteors to a limiting magnitude of +7.5. All streamed meteor imagery from each night is searched automatically using the MeteorScan software developed by P. Gural on a distributed network of PCs. An example movie showing a common pair of two station meteors from Elginfield and Tavistock are here and here respectively. The systems detect approximately 20 two station events per hour in the early morning.
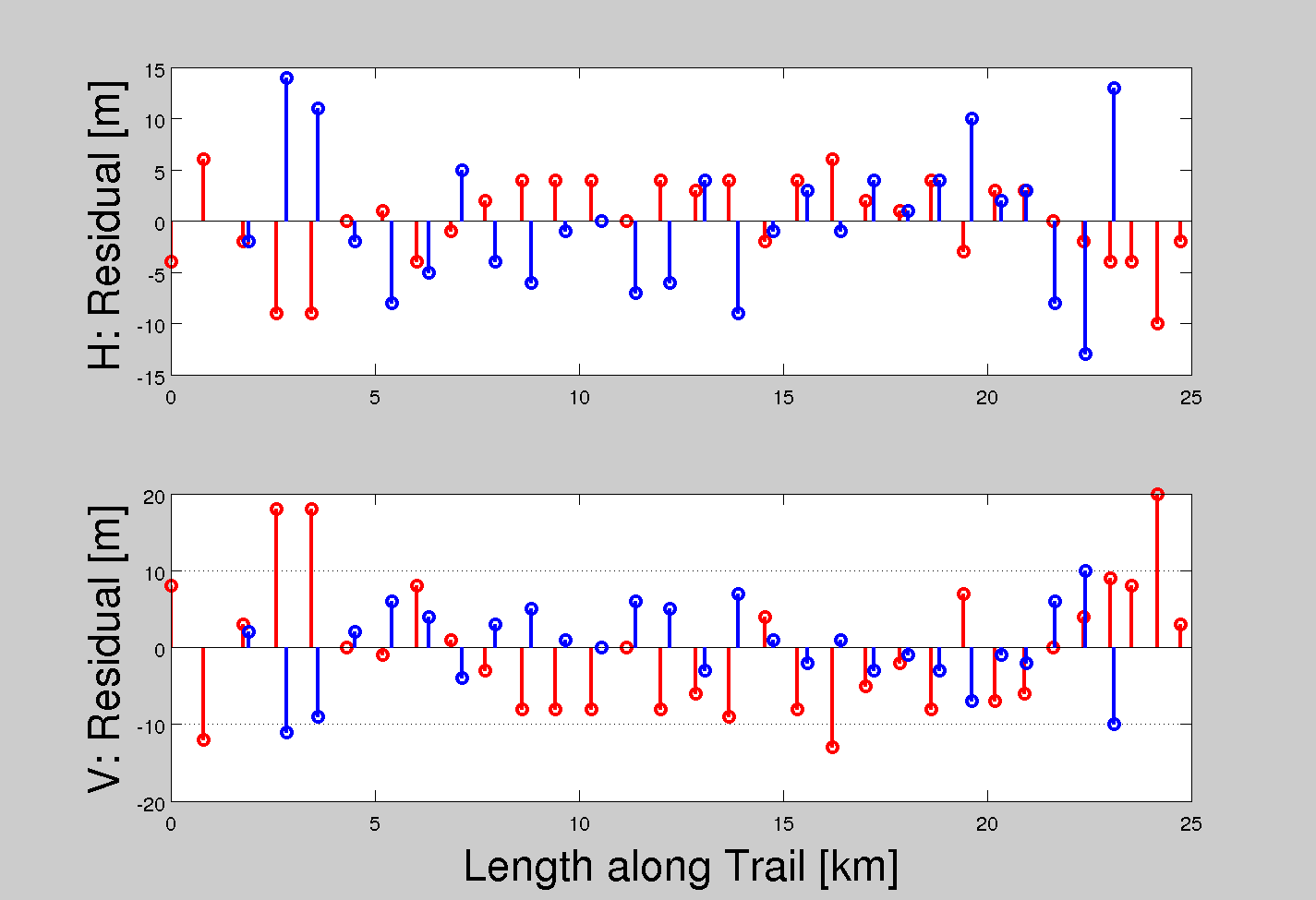
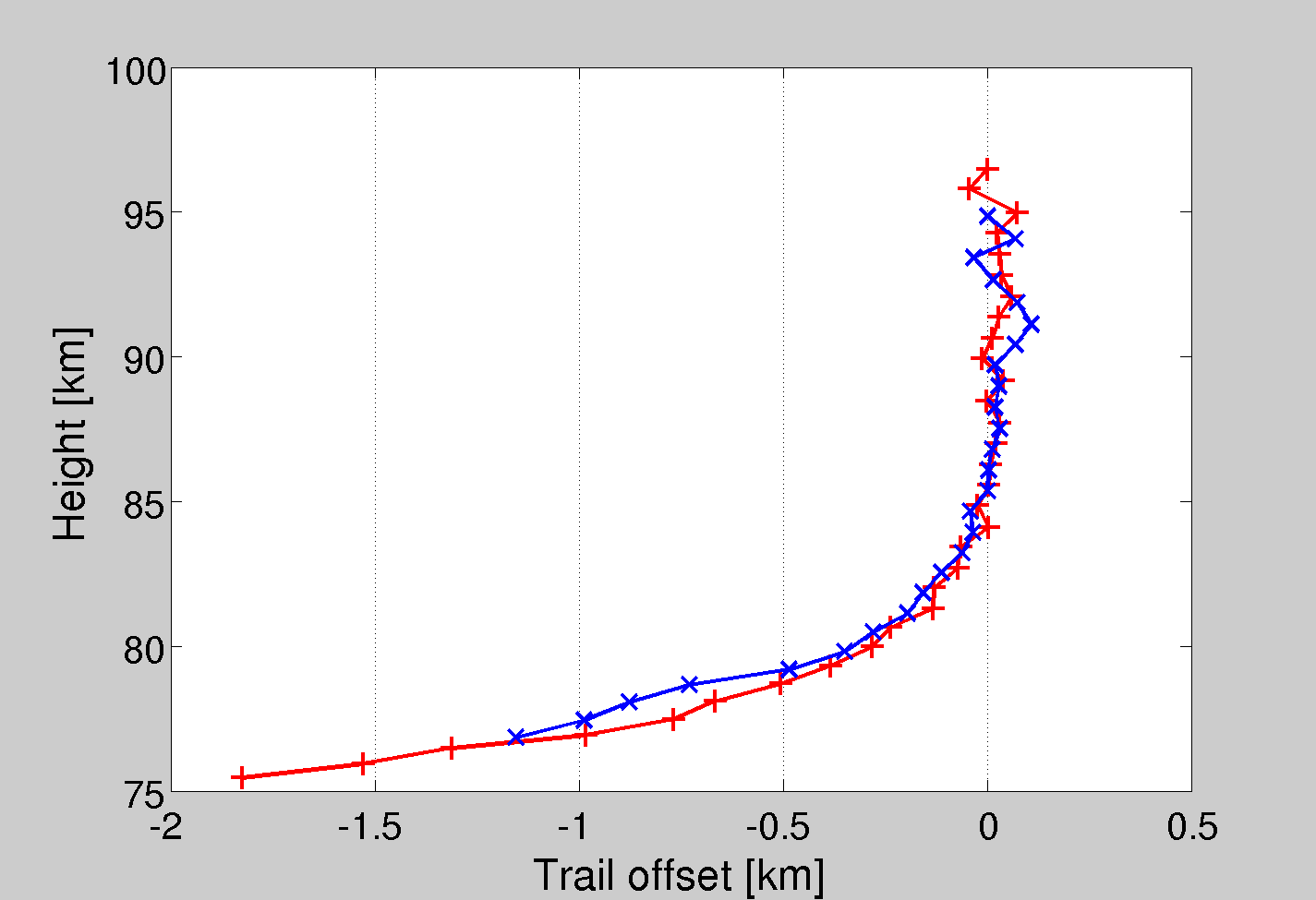
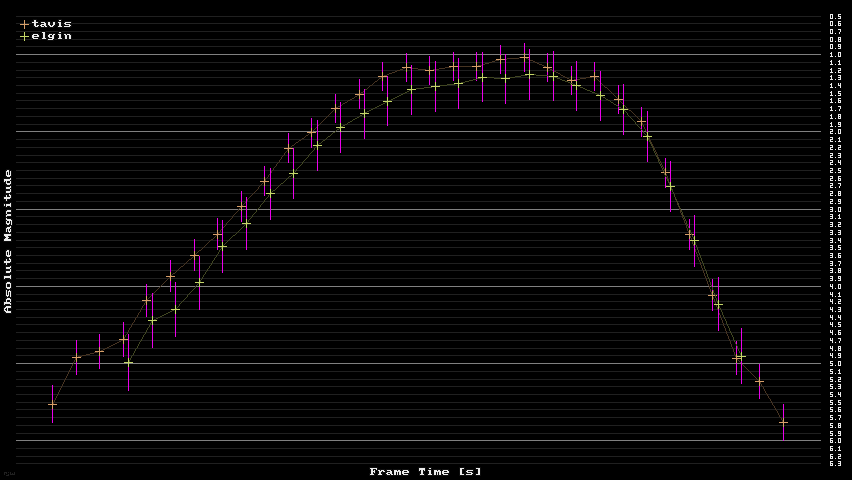
Two station solutions from this system show residuals ~10m and reveal deceleration in about 50% of all detected two station cases. For the bright meteor shown in the two previous movies, the reduced data is shown below. The event was captured September 11, 2009 at 04:04:33 UT. The horizontal and vertical residuals for Elginfield (Red) and Tavistock (Blue), the deceleration and light curve are shown below:
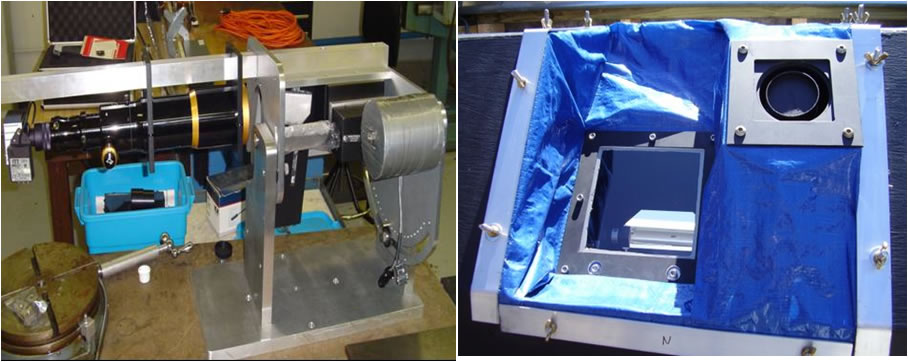
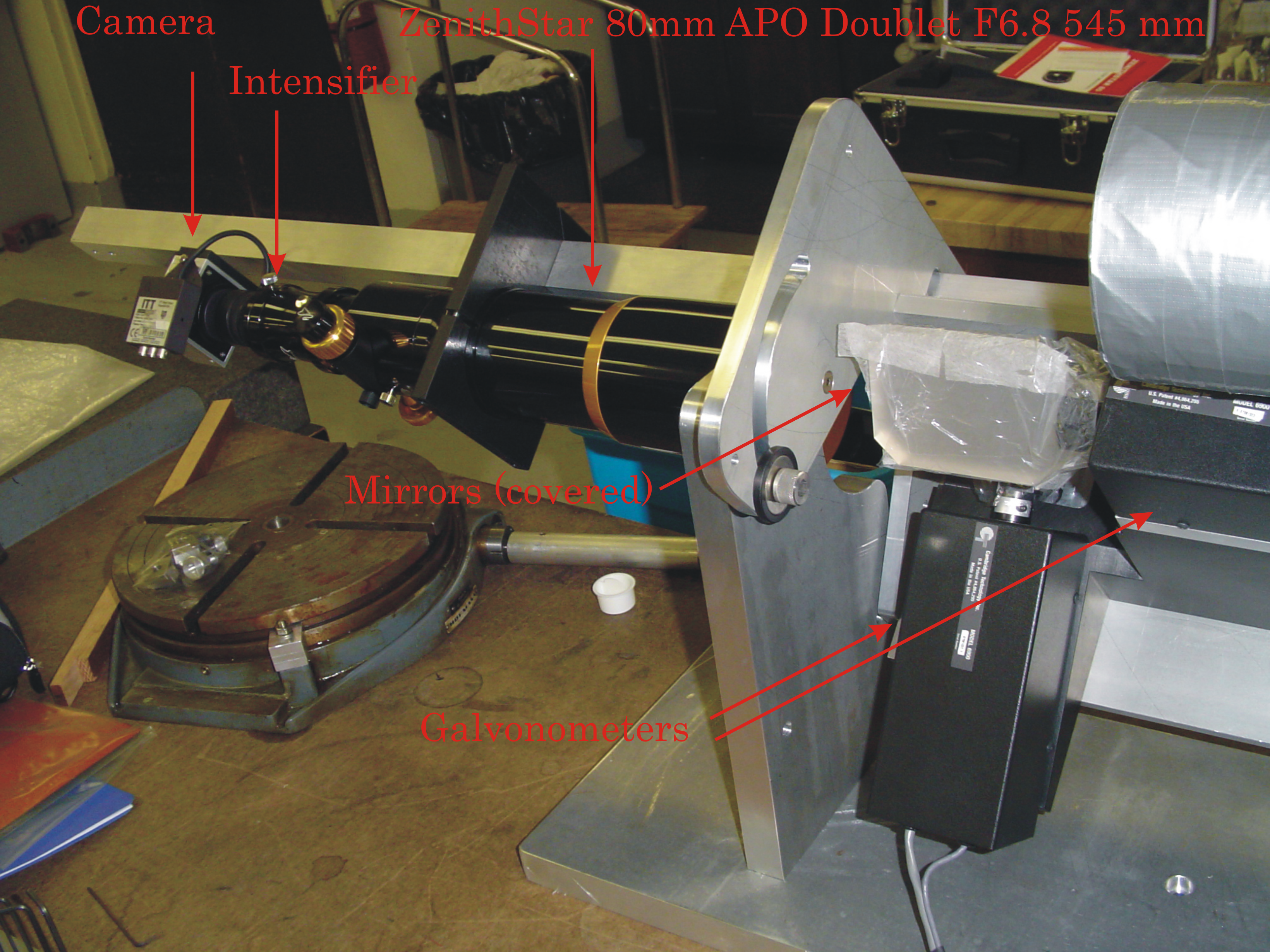
The second camera system making up CAMO is a narrow field, fast response mirror system, based on the AIM-IT system developed by P. Gural (Gural, 2004). This system consists of a wide-field of view, high frame rate CCD camera (Imperx LYNX IPX-VGA120-L) lens coupled to an ITT Nitecam model 380i generation 3 image intensifer. The camera operates at 80 frames per second at a resolution of 640x480 and produces 12 bit images. The wide field camera has a 25 x 10 field of view and a stellar sensitivity of +7. This camera tracks meteors in real time and the positional information is then used to position two mirrors controlled by two galvanometers which track the meteor in real time. The mirrors reflect light from the meteor to a telescope which has an ITT Nitecam model 380i generation 3 image intensifer and Imperx LYNX IPX-VGA120-L CCD camera located at the telescope focus. This system has a field of view of 1.5 degrees and also updates at 80 frames per second. Some example wide field and corresponding narrow field events can be found here. The mirror system is shown below: